require 'ai4r'
load_library :vecmath
require_relative 'training_patterns.rb'
attr_reader :img, :img_pixels, :ci_input, :cr_input, :tr_input, :sq_input, :net, :points
def setup
size(320, 320)
@points = []
srand 1
@net = Ai4r::NeuralNetwork::Backpropagation.new([256, 3])
@tr_input = TRIANGLE.flatten.collect { |input| input.to_f / 127.0}
@sq_input = SQUARE.flatten.collect { |input| input.to_f / 127.0}
@cr_input = CROSS.flatten.collect { |input| input.to_f / 127.0}
@ci_input = CIRCLE.flatten.collect { |input| input.to_f / 127.0}
train
background 255
end
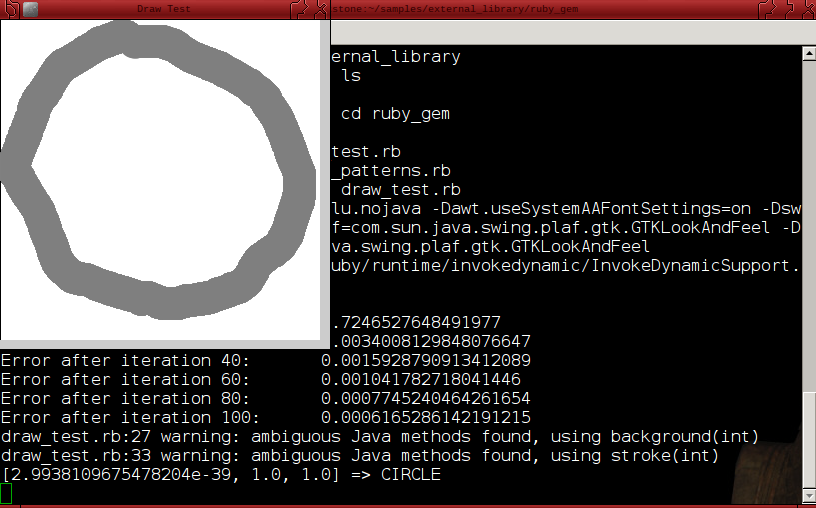
def draw
stroke_weight 32
stroke 127
points.each_cons(2) { |ps, pe| line ps.x, ps.y, pe.x, pe.y}
end
def train
puts "Training Network Please Wait"
101.times do |i|
error = net.train(tr_input, [1.0, 0, 0])
error = net.train(sq_input, [0, 1.0, 0])
error = net.train(cr_input, [0, 0, 1.0])
error = net.train(ci_input, [0, 1.0, 1.0])
puts "Error after iteration #{i}:\t#{error}" if i%20 == 0
end
end
def result_label(result)
if result.inject(0, :+) > 1.9
if result[0] < result[1] && result[0] < result[2]
return "CIRCLE"
else
return "UNKNOWN"
end
elsif result[0] > result[1] && result[0] > result[2]
return "TRIANGLE"
elsif result[1] > result[2]
return "SQUARE"
elsif result[2] > result[0] && result[2] > result[1]
return "CROSS"
else
return "UNKNOWN"
end
end
def mouse_dragged
points << Vec2D.new(mouse_x, mouse_y)
end
def mouse_released
points.clear
end
def key_pressed
case key
when 'e', 'E'
load_pixels
img_pixels = []
(0...height).step(20) do |y|
row = []
(0...width).step(20) do |x|
row << 255 - brightness(pixels[(y + 10) * width + x + 10])
end
img_pixels << row
end
puts "#{net.eval(img_pixels.flatten).inspect} => #{result_label(net.eval(img_pixels.flatten))}"
when 'c', 'C'
background 255
end
end
The training data
TRIANGLE = [
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 25, 229, 229, 25, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 127, 127, 127, 127, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 25, 229, 25, 25, 229, 25, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 127, 127, 0, 0, 127, 127, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 25, 229, 25, 0, 0, 25, 229, 25, 0, 0, 0, 0],
[ 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0],
[ 0, 0, 0, 25, 229, 25, 0, 0, 0, 0, 25, 229, 25, 0, 0, 0],
[ 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0],
[ 0, 0, 25, 229, 25, 0, 0, 0, 0, 0, 0, 25, 229, 25, 0, 0],
[ 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0],
[ 0, 25, 229, 25, 0, 0, 0, 0, 0, 0, 0, 0, 25, 229, 25, 0],
[ 0, 127, 127, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 127, 127, 0],
[25, 229, 25, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 25, 229, 25],
[127, 127, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 127, 127],
[255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255]
]
SQUARE = [
[255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 255],
[255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255]
]
CROSS = [
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127],
[127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127, 127],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0],
[ 0, 0, 0, 0, 0, 0, 0, 127, 127, 0, 0, 0, 0, 0, 0, 0]
]
CIRCLE = [
[0, 0, 0, 0, 32, 64, 64, 80, 80, 64, 64, 32, 0, 0, 0, 0],
[0, 0, 32, 64, 96, 103, 64, 64, 64, 64, 96, 96, 64, 32, 0, 0],
[0, 32, 96, 128, 96, 32, 0, 0, 0, 0, 32, 89, 128, 96, 32, 0],
[0, 64, 128, 96, 18, 0, 0, 0, 0, 0, 0, 0, 64, 128, 64, 0],
[32, 96, 96, 18, 0, 0, 0, 0, 0, 0, 0, 0, 0, 82, 101, 32],
[64, 103, 32, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 32, 96, 64],
[64, 64, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 64, 68],
[80, 64, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 64, 104],
[80, 64, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 64, 106],
[64, 64, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 64, 70],
[64, 96, 32, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 32, 96, 64],
[32, 96, 88, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 64, 119, 32],
[0, 64, 128, 64, 0, 0, 0, 0, 0, 0, 0, 0, 32, 113, 70, 0],
[0, 32, 96, 128, 81, 32, 0, 0, 0, 0, 32, 64, 113, 96, 32, 0],
[0, 0, 32, 64, 102, 96, 64, 64, 64, 64, 96, 119, 70, 32, 0, 0],
[0, 0, 0, 0, 32, 64, 69, 105, 106, 70, 64, 32, 0, 0, 0, 0]
]